
About me
Jingwei Song is a senior software enginner in United Imaging Research Institute of Intelligent Imaging, Beijing 100144, China. Before that, he was a Research Associate with the Department of Naval Architecture and Marine Engineering, University of Michigan, Ann Arbor, MI, USA. He received the Ph.D. degree in center of autonomous system from the University of Technology Sydney, Ultimo, NSW, Australia, in 2020.
His research interests include computer vision, simultaneous localization and mapping, and robotics.
我(宋经纬)为联影研究院的资深软件算法工程师。2020年博士毕业于悉尼科技大学机器人研究所。2020年到2022年在密歇根大学机器人研究所从事两年博士后研究。研究方向为同步定位与制图(SLAM),机器人和计算机视觉。
Download: CV
News
[Feb 2025] Two papers accepted by 2025 IEEE International Conference on Robotics and Automation (ICRA2025).
[Jan 2024] One paper accepted by 2024 IEEE International Conference on Robotics and Automation (ICRA2024).
[Dec 2023] One paper accepted by IEEE Robotics and Automation Letters. One paper accepted by International Journal of Computer Assisted Radiology and Surgery.
[Oct 2022] The long paper ‘BDIS: Bayesian Dense Inverse Searching Method for Real-Time Stereo Surgical Image Matching’ is published by IEEE Transactions on Robotics. It brief paper ‘Bayesian Dense Inverse Searching Algorithm for Real-Time Stereo Matching in Minimally Invasive Surgery’ is published by MICCAI (International Conference on Medical Image Computing and Computer-Assisted Intervention, 2022)
[July 2022] I serve as a senior software engineer in United Imaging Research Institute of Intelligent Imaging, Beijing 100144, China
[May 2022] 1 paper accepted by IEEE Robotics and Automation Letters and 1 paper accepted by ICRA2022.
[July 2021] The paper ‘J Song, M Patel, A Girgensohn, C Kim. “Combining Deep Learning with Geometric Features for Image based Localization in the Gastrointestinal Tract.” has been accepted by Expert systems and applications (Q1 journal) for publication
[July 2020] I serve as the research associate in A/Prof. Maani Ghaffari‘s lab (Computational Autonomy and Robotics Laboratory) for 2 years.
[June 2019] I will work with Dr. Mitesh Patel in lab FXPALfor 6 months.
[June 2018] Our paper ‘MIS-SLAM: Real-time Large Scale Dense Deformable SLAM System in Minimal Invasive Surgery Based on Heterogeneous Computing’ has been accepted by IEEE/RSJ IEEE Robotics and Automation Letters (RAL with IROS option). I will attend IROS held in Madrid in 1-5 Oct. Media link
[15 June 2018] I have won first prize of the showcase competition in FEIT (Faculty of Engineering and Information Technology, UTS).
[August 2017] I’m awarded IROS Travel Award funded by the IEEE Robotics and Automation Society!
[July 2017] Our IROS accepted paper “Jingwei Song, Jun Wang, Liang Zhao, Shoudong Huang and Gamini Dissanayake. Dynamic Reconstruction of Deformable Soft-tissue with Stereo Scope in Minimal Invasive Surgery. ” is accepted by IEEE/RSJ IEEE Robotics and Automation Letters (RAL with IROS option)
[June 2017] Have a wonderful journey to (Computer Assisted Radiology and Surgery 2017) Barcelona and (Hamlyn Symposium on Medical Robot 2017) London. Meet lots of nice scholars and friends. I was listed in CARS2017 daily news CARS 2017 Daily News
[15 June 2017] I have won second prize of the showcase competition. Thank you Shoudong, Liang, Karthick, Jun, Cedric, Teresa for your very helpful suggestions Research Showcase
[15 June 2017] Our paper “Jingwei Song, Jun Wang, Liang Zhao, Shoudong Huang and Gamini Dissanayake. Dynamic Reconstruction of Deformable Soft-tissue with Stereo Scope in Minimal Invasive Surgery. ” is accepted by IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017 (IROS2017)
[15 June 2017] Our paper “Jun Wang, Jingwei Song, Liang Zhao and Shoudong Huang. A Submap Joining Based RGB-D SLAM Algorithm using Planes as Features. ” is accepted by 11th Conference on Field and Service Robotics (FSR2017)
[May 2017] Our abstract paper “Jingwei Song, Jun Wang, Liang Zhao, Shoudong Huang and Gamini Dissanayake. Robust Shape Recovery of Deformable Soft-tissue Based on Information from Stereo Scope for Minimal Invasive Surgery. ” is accepted by Hamlyn Symposium on Medical Robotics 2017
[Feb 2017] Our abstract paper “Dynamic Reconstruction of Deformable Soft-tissue with Stereo Scope in Minimal Invasive Surgery. Computer Assisted Radiology and Surgery (CARS2017) ” is accepted by Computer Assisted Radiology and Surgery 2017 (CARS2017)
[20 November 2016] Our paper “Jingwei Song, Jun Wang, Liang Zhao, Shoudong Huang and Gamini Dissanayake. 3D Shape Recovery of Deformable Soft-tissue with Computed Tomography and Depth Scan ” is accepted by Australasian Conference on Robotics and Automation (ACRA2016).
Selected research projects
For full publication list, please go to [CV] or the [Google Scholar]
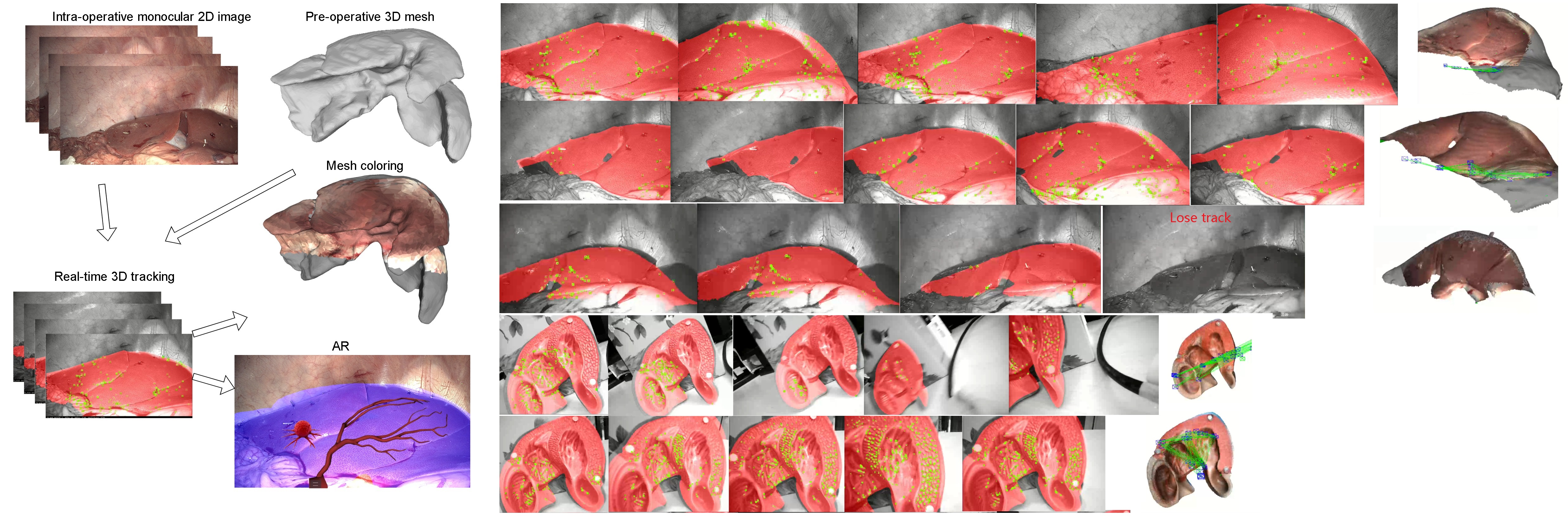
Song Jingwei, Ray Zhang, Wenwei Zhang, Hao Zhou, Maani Ghaffari. SLAM assisted 3D tracking system for laparoscopic surgery, 2025 IEEE International Conference on Robotics and Automation (ICRA2025), May 2025. [Arxiv] [Video]
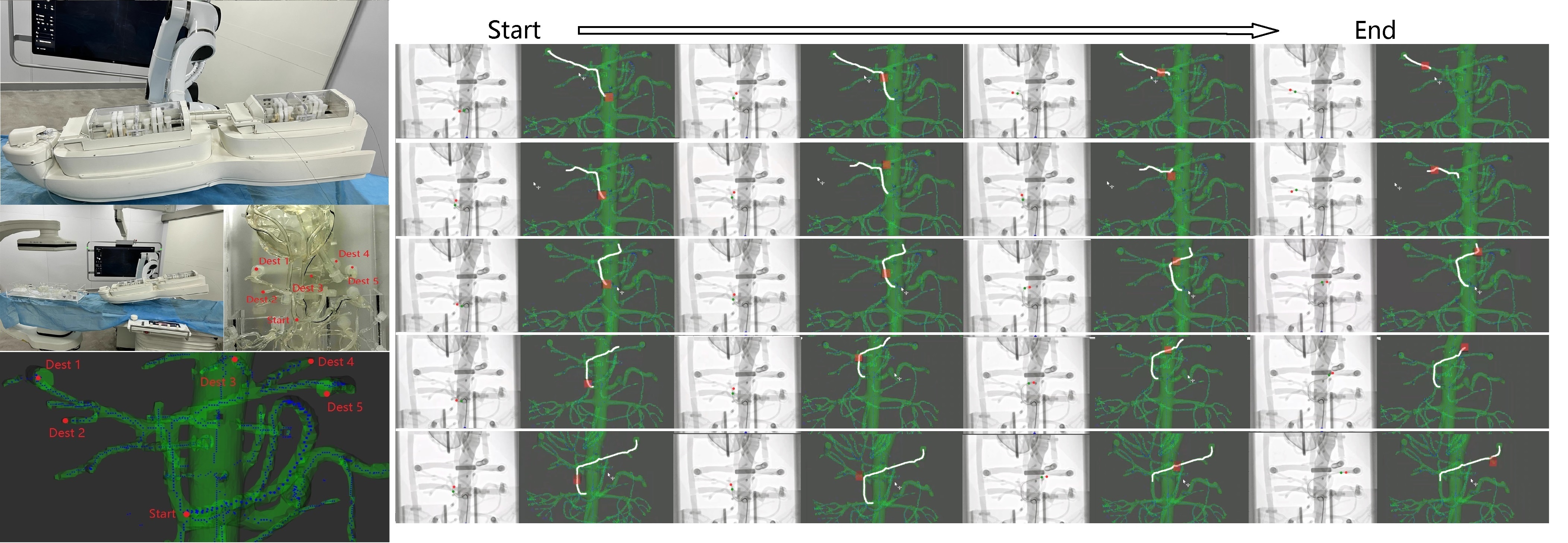
Song Jingwei, Keke Yang, Han Chen, Jiayi Liu, Yinan Gu, Qianxin Hui, Yanqi Huang, Meng Li, Zheng Zhang, Tuoyu Cao, Maani Ghaffari. VascularPilot3D: Toward a 3D fully autonomous navigation for endovascular robotics, 2025 IEEE International Conference on Robotics and Automation (ICRA2025), May 2025. [Arxiv] [Video]
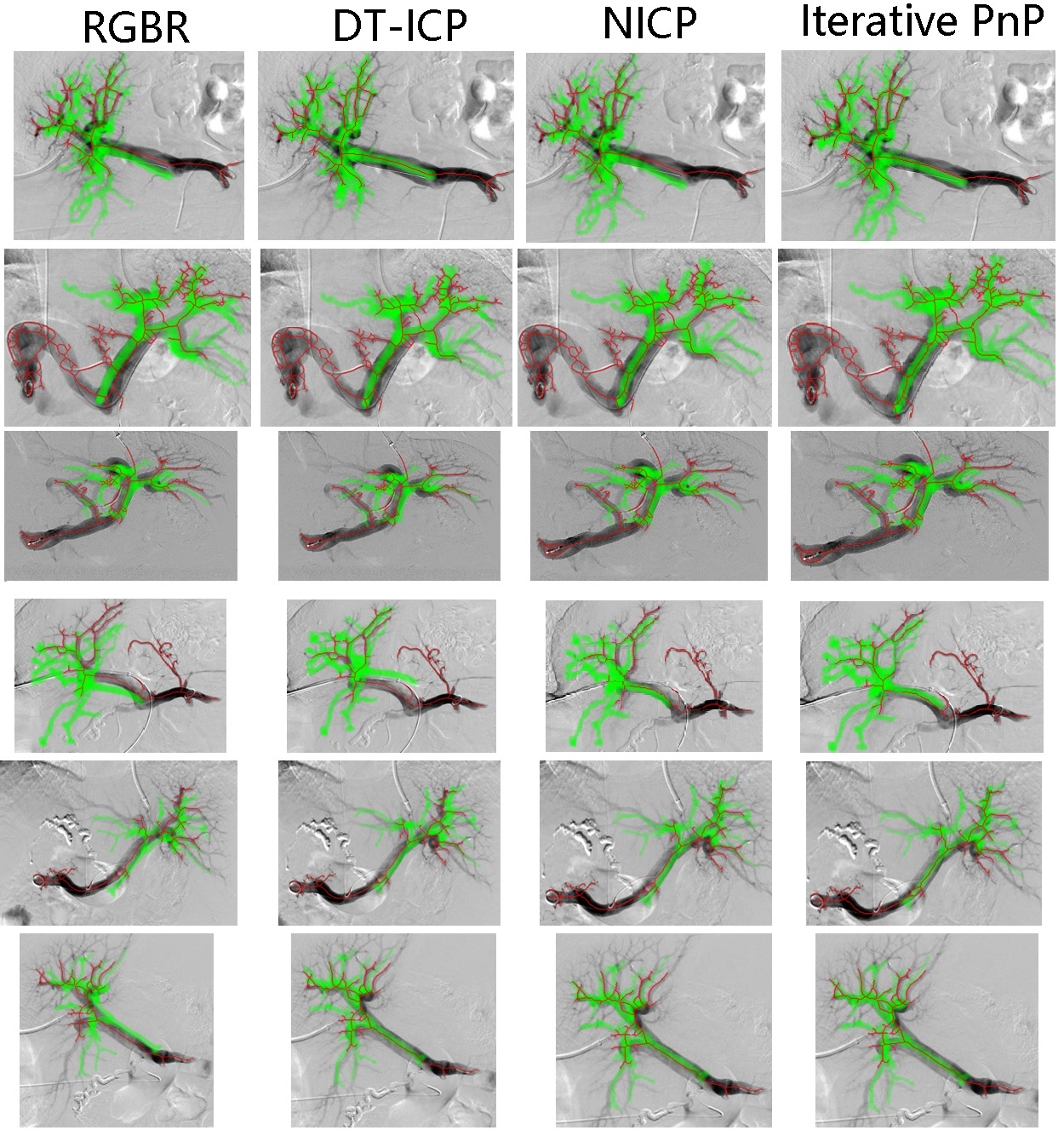
Song Jingwei, Keke Yang, Zheng Zhang, Meng Li, Tuoyu Cao and Maani Ghaffari. Iterative PnP and its application in 3D-2D vascular image registration for robot navigation, 2024 IEEE International Conference on Robotics and Automation (ICRA2024), pp. 17560-17566, May 2024, doi: 10.1109/ICRA57147.2024.10610392. [Paper] [Arxiv] [Video]
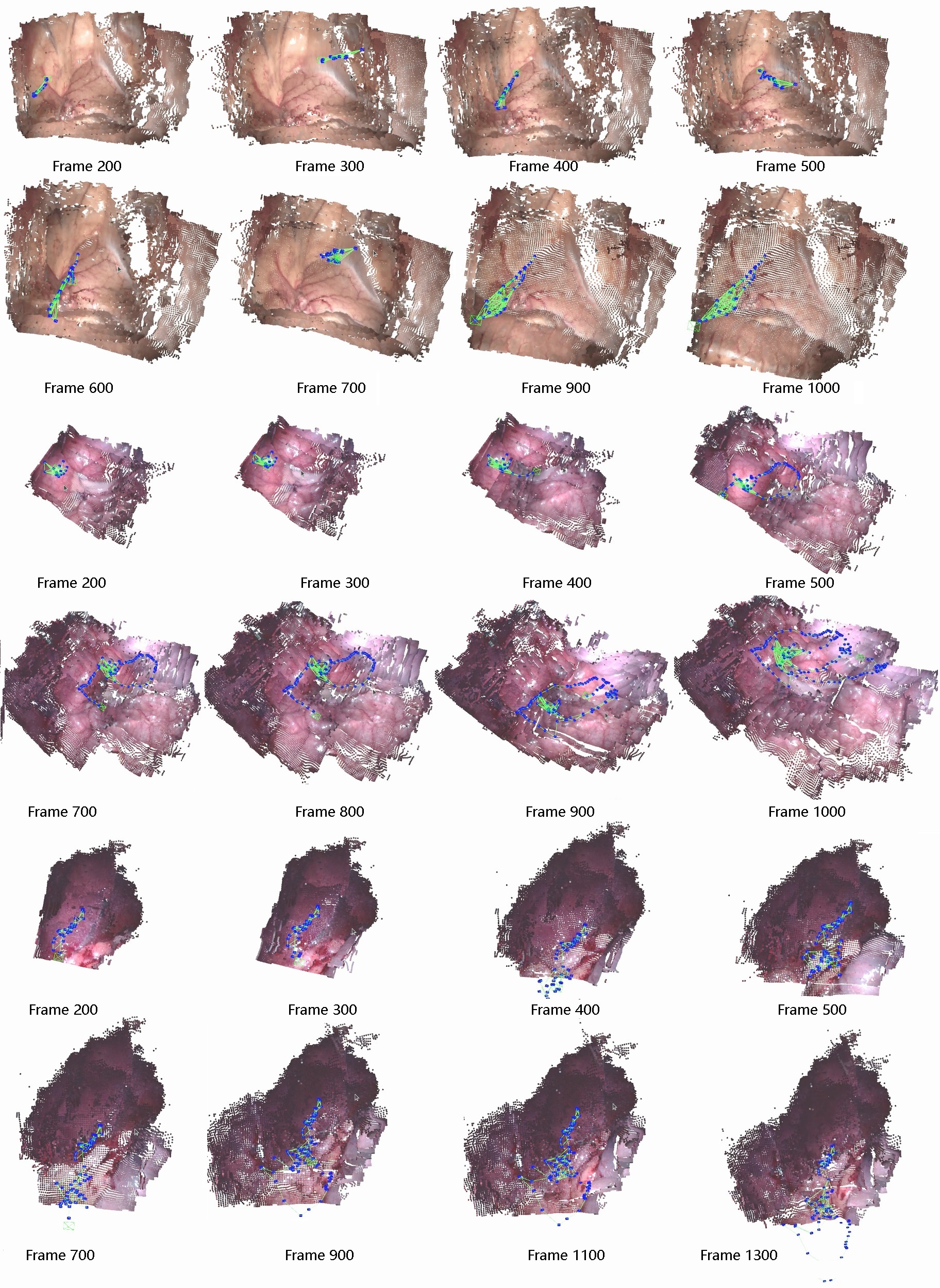
Song Jingwei, Ray Zhang, Qiuchen Zhu, Jianyu Lin and Maani Ghaffari. BDIS-SLAM: A lightweight CPU-based dense stereo SLAM for surgery, in International Journal of Computer Assisted Radiology and Surgery (IJCARS), January 2024, doi: https://doi.org/10.1007/s11548-023-03055-1. [Paper] [Arxiv] [Video] [Code]
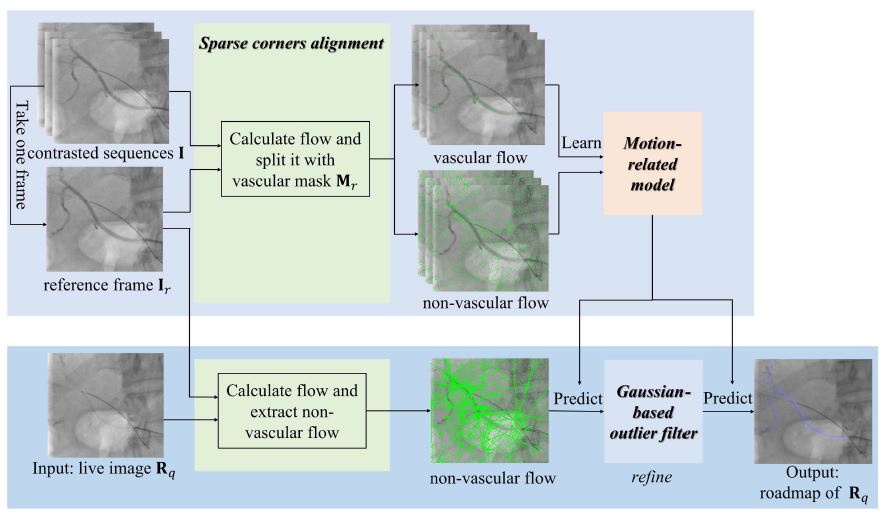
Keke Yang, Zheng Zhang, Meng Li, Tuoyu Cao, Maani Ghaffari, and Song Jingwei, Optical Flow-Based Vascular Respiratory Motion Compensation in IEEE Robotics and Automation Letters, vol. 8, no. 11, pp. 6987-6994 (RAL), Nov. 2023, doi: 10.1109/LRA.2023.3313936. [Paper] [Arxiv] [Video]
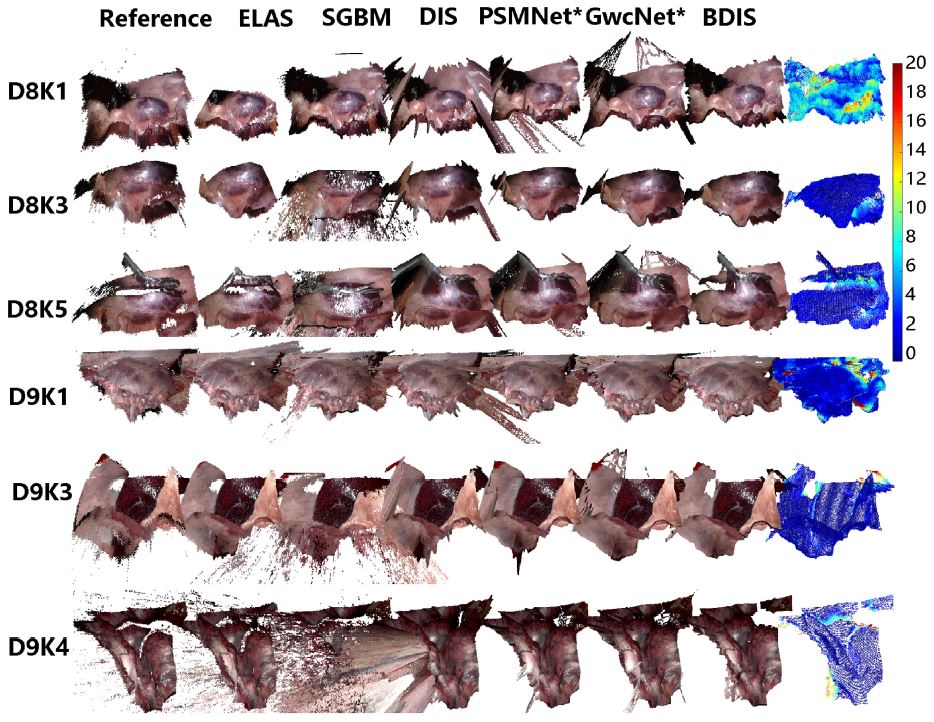
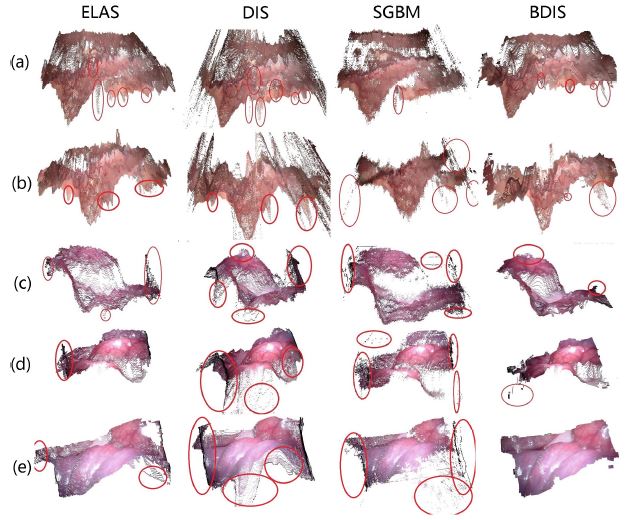
Song Jingwei, Zhu Qiuchen, Lin Jianyu and Ghaffari Maani. BDIS: Bayesian Dense Inverse Searching Method for Real-Time Stereo Surgical Image Matching, in IEEE Transactions on Robotics, vol. 39, no. 2, pp. 1388-1406 (TRO), April 2023. [Paper] [Arxiv] [Video] [Code]
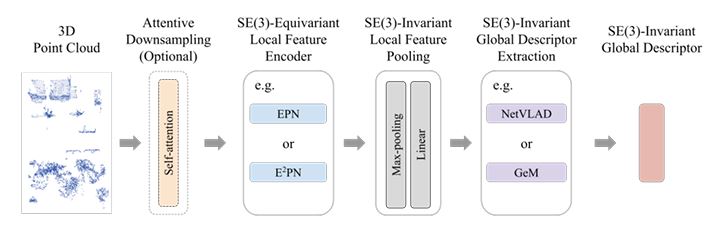
Chien Erh Lin, Song Jingwei, Ray Zhang, Minghan Zhu and Ghaffari Maani. Se (3)-equivariant point cloud-based place recognition. In Conference on Robot Learning (pp. 1520-1530) (CoRL 2023). PMLR 2023. [Paper] [Code]
Song Jingwei, Zhu Qiuchen, Lin Jianyu and Ghaffari Maani. Bayesian dense inverse searching algorithm for real-time stereo matching in minimally invasive surgery[C]//International Conference on Medical Image Computing and Computer-Assisted Intervention. Springer, Cham, (MICCAI2022): 333-344. (Oral presentation) [Paper] [Arxiv] [Video][Code]
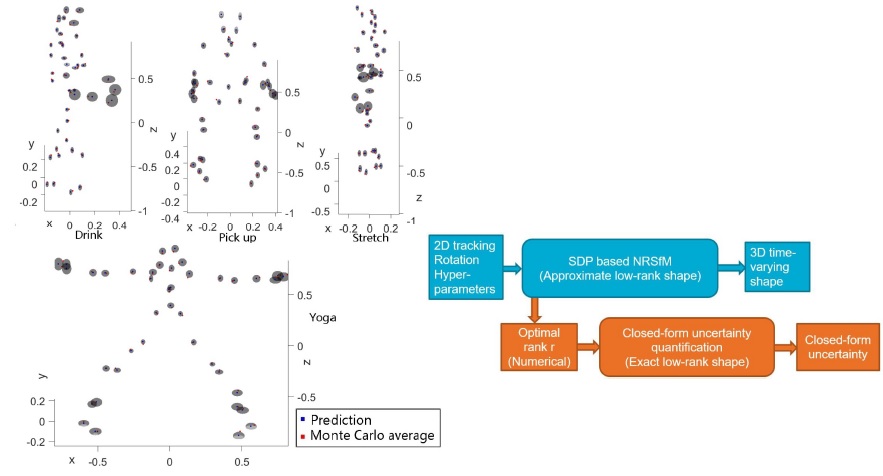
Song Jingwei, Patel Mitesh, M. Jasour Ashkan and Ghaffari Maani, A Closed-Form Uncertainty Propagation in Non-Rigid Structure From Motion, in IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 6479-6486, July 2022 (RAL), doi: 10.1109/LRA.2022.3173733. [Paper] [Arxiv] [Video][Code]
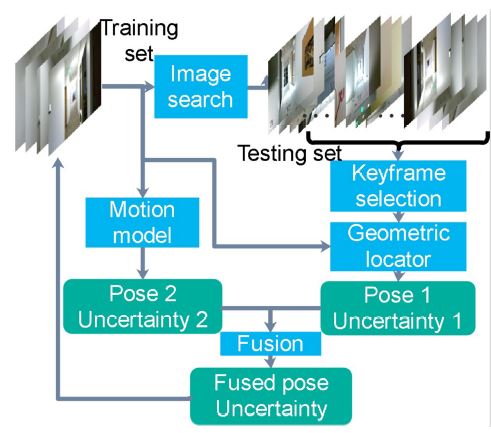
Song Jingwei, Patel Mitesh and Ghaffari Maani. Fusing Convolutional Neural Network and Geometric Constraint for Image-Based Indoor Localization, in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 1674-1681, April 2022 (RAL), doi: 10.1109/LRA.2022.3140832. [Paper] [Arxiv] [Video]
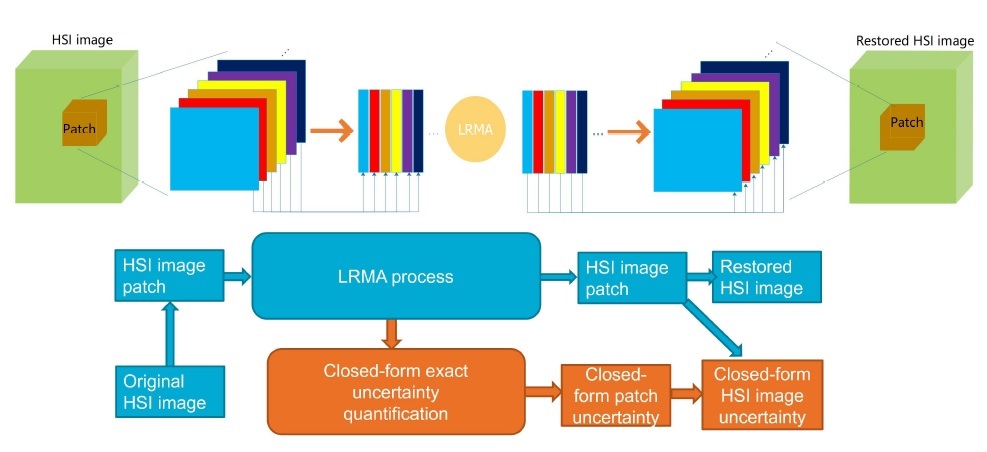
Song Jingwei, Xia Shaobo, Wang Jun, Patel Mitesh and Chen Dong, Uncertainty Quantification of Hyperspectral Image Denoising Frameworks Based on Sliding-Window Low-Rank Matrix Approximation, in IEEE Transactions on Geoscience and Remote Sensing, vol. 60, pp. 1-12, 2022 (TGRS), Art no. 5504212, doi: 10.1109/TGRS.2021.3065570. [Paper)] [Arxiv][Code]
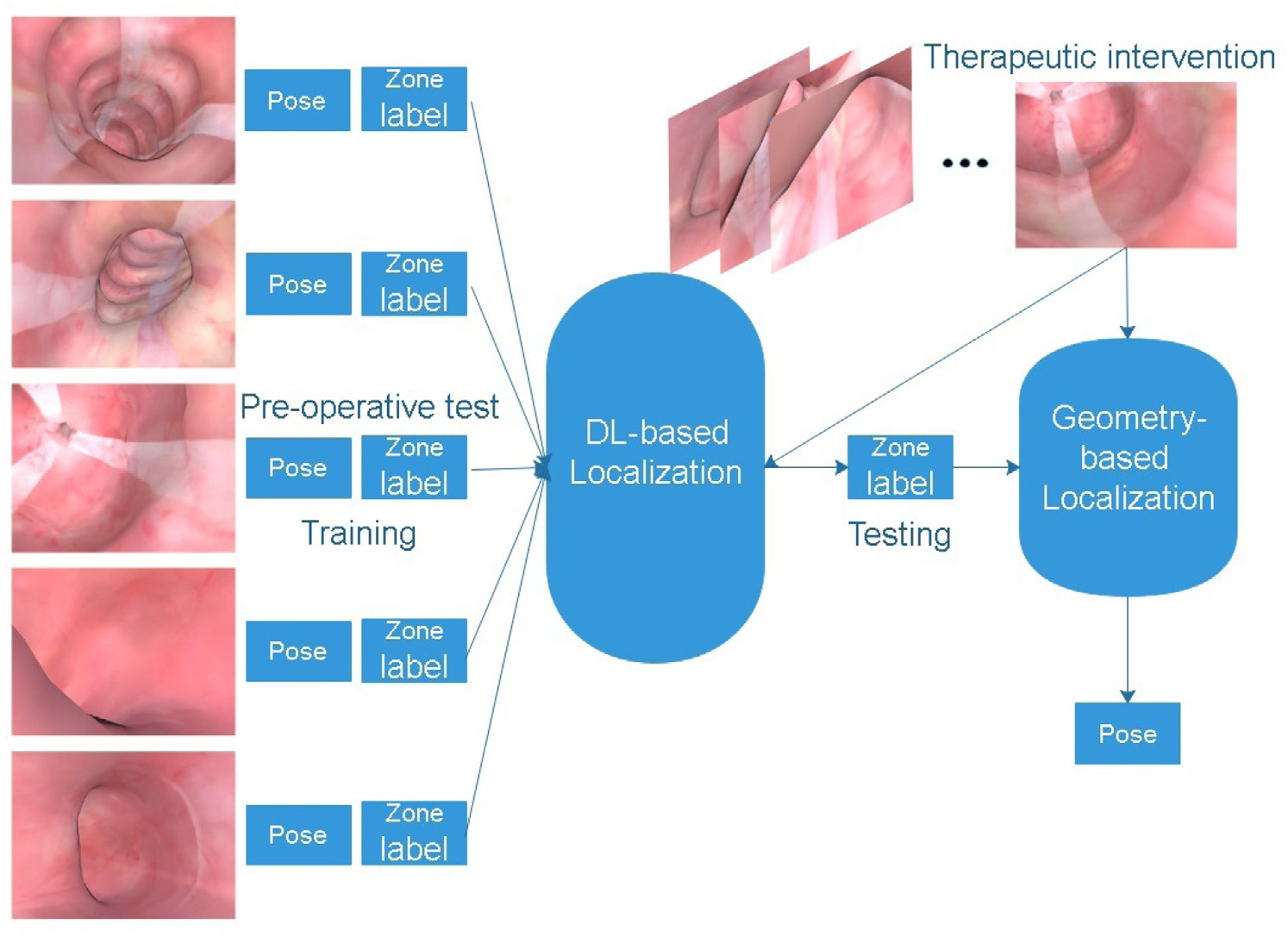
Song Jingwei, Patel Mitesh, Girgensohn Andreas and Kim Chelhwon. Combining deep learning with geometric features for image-based localization in the Gastrointestinal tract[J]. Expert Systems with Applications, 2021 (EWSA), 185: 115631. [Paper] [Arxiv] [Video]
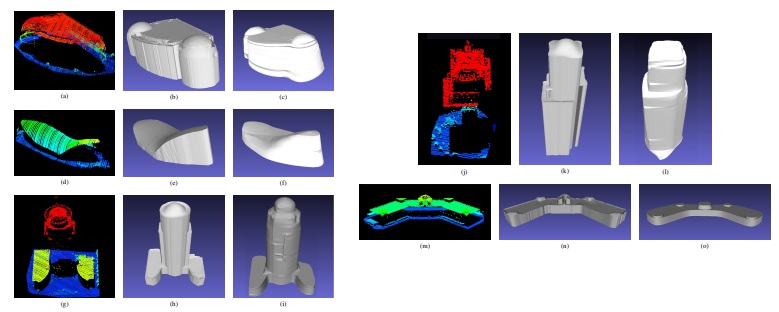
Song Jingwei, Xia Shaobo, Wang Junand Chen Dong. Curved Buildings Reconstruction From Airborne LiDAR Data by Matching and Deforming Geometric Primitives, in IEEE Transactions on Geoscience and Remote Sensing, vol. 59, no. 2, pp. 1660-1674, Feb. 2021 (TGRS), doi: 10.1109/TGRS.2020.2995732. [Paper)] [Arxiv]
Song Jingwei, Bai Fang, Zhao Liang, Huang Shoudong and Xiong Rong. Efficient two step optimization for large embedded deformation graph based SLAM, 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020, (ICRA2020), pp. 9419-9425, doi: 10.1109/ICRA40945.2020.9196930. [Paper] [Arxiv] [Video]
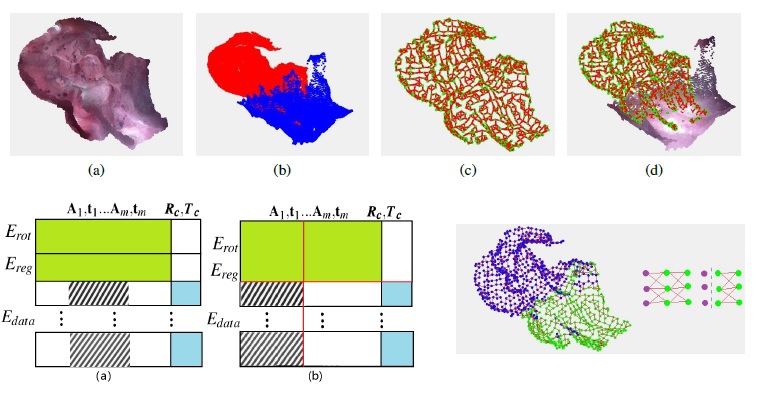
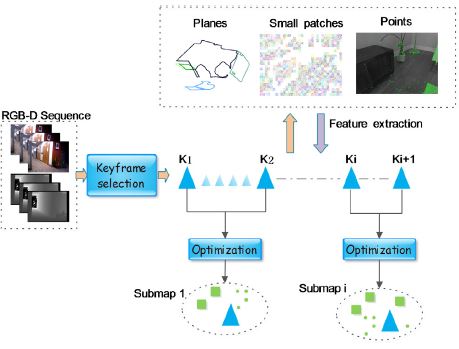
Wang Jun, Song Jingwei, Zhao Liang and Huang Shoudong. A submap joining algorithm for 3d reconstruction using an rgb-d camera based on point and plane features[J]. Robotics and Autonomous Systems, 2019,(RAS), 118: 93-111. [Paper]
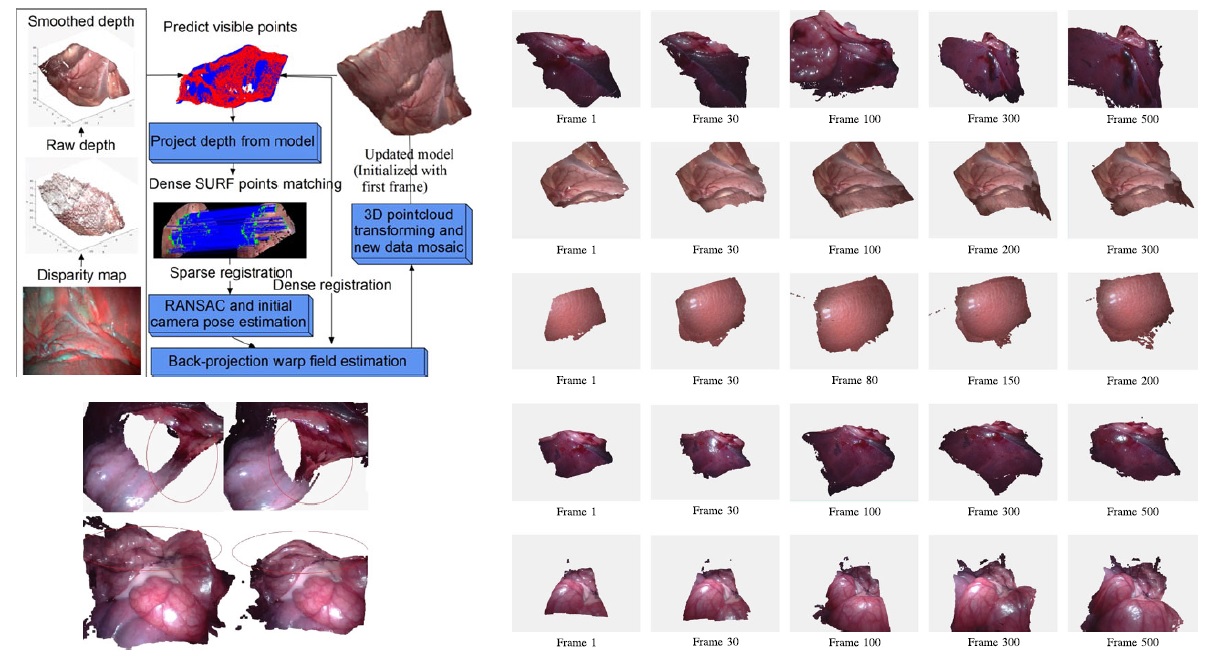
Song Jingwei, Wang Jun, Zhao Liang , Huang Shoudong and Dissanayake Gamini. MIS-SLAM: Real-time Large Scale Dense Deformable SLAM System in Minimal Invasive Surgery Based on Heterogeneous Computing. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018 (RAL-IROS 2018 option) [Paper] [Arxiv] [Video]

Song Jingwei, Wang Jun, Zhao Liang , Huang Shoudong and Dissanayake Gamini. Dynamic Reconstruction of Deformable Soft-tissue with Stereo Scope in Minimal Invasive Surgery. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2017 (RAL-IROS 2017 option) [Paper] [Arxiv] [Video]
Contact
Please contact me at email address: jingweisong.eng@outlook.com jingweisong@yahoo.com